Princípios Físicos do Voo de Multirrotores
Compreender a física do voo é o alicerce de toda operação segura com UAS. Diferentemente das aeronaves de asa fixa, os multirrotores geram sustentação exclusivamente pela rotação de hélices, sem superfícies aerodinâmicas fixas. Isso confere grande manobrabilidade, mas também impõe limitações específicas que o piloto deve conhecer profundamente.
As Quatro Forças Fundamentais
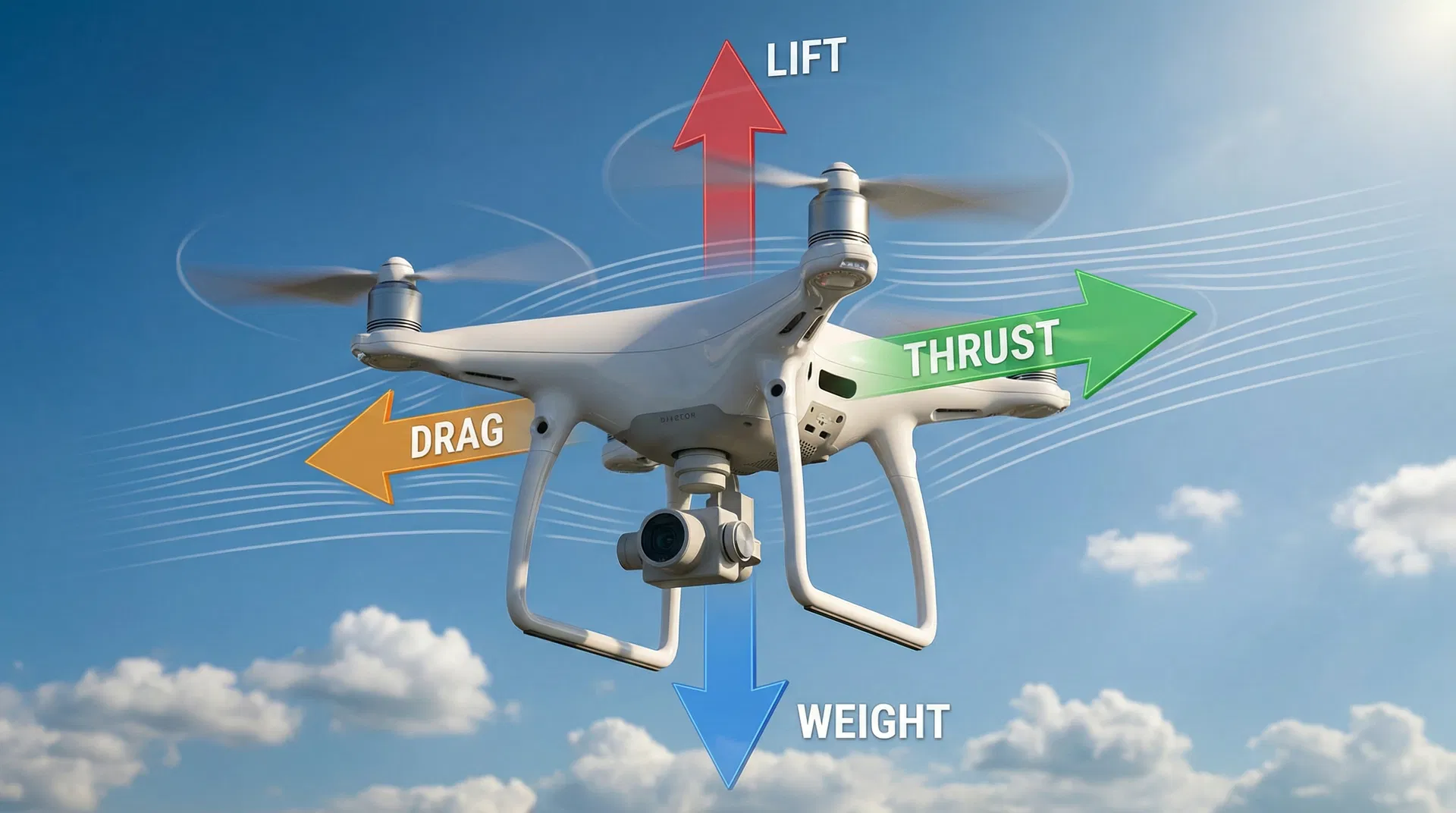
O voo de qualquer aeronave é governado pelo equilíbrio entre quatro forças vetoriais. Em multirrotores, o piloto controla indiretamente essas forças por meio da variação do RPM (rotações por minuto) de cada motor individualmente.
| Força | Símbolo | Direção | Gerada por | Controlada pelo piloto? |
|---|---|---|---|---|
| Sustentação | L (Lift) | ↑ Vertical | Rotação das hélices | Sim — via throttle |
| Peso | W (Weight) | ↓ Vertical | Gravidade × massa total | Não — fixo para cada missão |
| Tração | T (Thrust) | → Horizontal | Inclinação da aeronave (pitch/roll) | Sim — via stick de direção |
| Arrasto | D (Drag) | ← Oposta ao movimento | Resistência do ar | Indiretamente — via velocidade |
Para que a aeronave paire em voo estacionário (hover), é necessário que L = W (sustentação igual ao peso) e T = D (tração igual ao arrasto). Qualquer desequilíbrio resulta em movimento na direção da força dominante.
Sistema de Propulsão: Motores e Hélices
O sistema de propulsão de um multirotor é composto por motores brushless, controladores eletrônicos de velocidade (ESC) e hélices. A eficiência desse conjunto determina diretamente a autonomia de voo e a capacidade de carga útil da aeronave.
Motores Brushless
Os motores brushless (sem escovas) são preferidos em UAS profissionais por sua maior eficiência energética, menor manutenção e maior vida útil. As especificações técnicas mais importantes são:
| Especificação | O que significa | Exemplo prático |
|---|---|---|
| KV (RPM/V) | Rotações por minuto por volt aplicado | Motor 400 KV com bateria 22,2V = 8.880 RPM máx. |
| Potência (W) | Energia consumida na operação | Motor 500W × 4 motores = 2.000W total |
| Eficiência (g/W) | Gramas de tração por watt consumido | 10 g/W = 1 kg de tração com 100W |
| Torque (N·m) | Força de rotação disponível | Maior torque = melhor resposta em ventos |
Hélices: Geometria e Performance
As hélices são definidas por dois números: diâmetro e passo. Uma hélice 10×4.5 tem 10 polegadas de diâmetro e 4,5 polegadas de passo (distância teórica percorrida por rotação). Hélices maiores são mais eficientes, mas exigem motores de menor KV. Hélices menores permitem maior agilidade, mas consomem mais energia para a mesma tração.
Dinâmica de Voo: Os Três Eixos de Rotação
Todo movimento de uma aeronave pode ser decomposto em rotações em torno de três eixos perpendiculares entre si. Compreender esses eixos é fundamental para interpretar o comportamento da aeronave e corrigir desvios de trajetória.
| Eixo | Movimento | Controle | Efeito visual |
|---|---|---|---|
| Longitudinal (X) | Roll (rolagem) | Stick direito — esquerda/direita | Aeronave inclina lateralmente |
| Lateral (Y) | Pitch (arfagem) | Stick direito — frente/trás | Aeronave inclina para frente/trás |
| Vertical (Z) | Yaw (guinada) | Stick esquerdo — esquerda/direita | Aeronave gira sobre o próprio eixo |
Em multirrotores, o controle de yaw é obtido pelo desequilíbrio entre os torques dos motores que giram no sentido horário e anti-horário. Por isso, a falha de um único motor pode comprometer completamente o controle de yaw, tornando a aeronave incontrolável.
Fenômenos Aerodinâmicos Críticos
Além das forças básicas, o piloto profissional deve conhecer fenômenos aerodinâmicos que podem comprometer a segurança da operação, especialmente em condições adversas ou manobras específicas.
Vortex Ring State (VRS) — Estado de Anel de Vórtice
O VRS ocorre quando a aeronave desce verticalmente a uma velocidade que se aproxima da velocidade induzida do fluxo de ar gerado pelas próprias hélices. Nessa condição, a aeronave "entra" no seu próprio fluxo de ar descendente, criando um anel de vórtice que reduz drasticamente a eficiência das hélices. O resultado é uma perda súbita de sustentação que pode ser irrecuperável em baixas altitudes.
Ground Effect (Efeito Solo)
Quando a aeronave opera a altitudes inferiores a um diâmetro de hélice acima do solo (tipicamente menos de 1 metro para drones compactos), o fluxo de ar das hélices é comprimido entre a aeronave e o solo, criando um "colchão de ar" que aumenta a eficiência das hélices em até 30%. Isso significa que a aeronave parece mais leve e responsiva próxima ao solo, mas pode perder sustentação abruptamente ao sair do efeito solo durante a decolagem.
Translational Lift (Sustentação Translacional)
Quando a aeronave passa de voo estacionário para voo translacional (com velocidade horizontal), as hélices encontram ar "fresco" não perturbado, aumentando a eficiência aerodinâmica. Esse fenômeno, chamado de sustentação translacional, ocorre tipicamente entre 15 e 25 km/h e pode causar uma leve elevação da aeronave se o piloto não compensar com redução de throttle.
Baterias e Gestão de Energia
As baterias LiPo (Lítio-Polímero) são a principal fonte de energia dos UAS modernos. Sua gestão inadequada é uma das principais causas de falhas em voo e incêndios durante o armazenamento.
| Parâmetro | Valor Seguro | Risco se violado |
|---|---|---|
| Tensão mínima por célula | 3,5V (operação) / 3,0V (absoluto) | Dano permanente à bateria, falha em voo |
| Tensão de armazenamento | 3,8V por célula | Degradação acelerada se armazenada carregada |
| Temperatura de operação | 15°C a 40°C | Abaixo de 10°C: redução de 30% na capacidade |
| Reserva mínima de voo | 20–30% de carga | Falha de motor por subtensão |
| Ciclos de vida | 200–500 ciclos (LiPo) | Acima: risco de inchamento (swelling) |
Sistemas de Estabilização e Controle de Voo
Os UAS modernos utilizam controladores de voo (flight controllers) que integram múltiplos sensores para manter a estabilidade automática da aeronave, mesmo sem intervenção do piloto.
| Sensor | Função | Limitação |
|---|---|---|
| IMU (Acelerômetro + Giroscópio) | Detecta inclinação e rotação em tempo real | Deriva ao longo do tempo (drift) |
| Barômetro | Mede altitude por pressão atmosférica | Impreciso em ventos fortes ou perto do solo |
| GPS/GNSS | Posicionamento horizontal e hold de posição | Inoperante em ambientes fechados ou com jamming |
| Magnetômetro (Bússola) | Orientação em relação ao norte magnético | Sensível a interferências eletromagnéticas |
| Sensor Óptico de Fluxo | Posicionamento em ambientes sem GPS | Requer superfície texturizada e boa iluminação |